Les grilles d'occupation
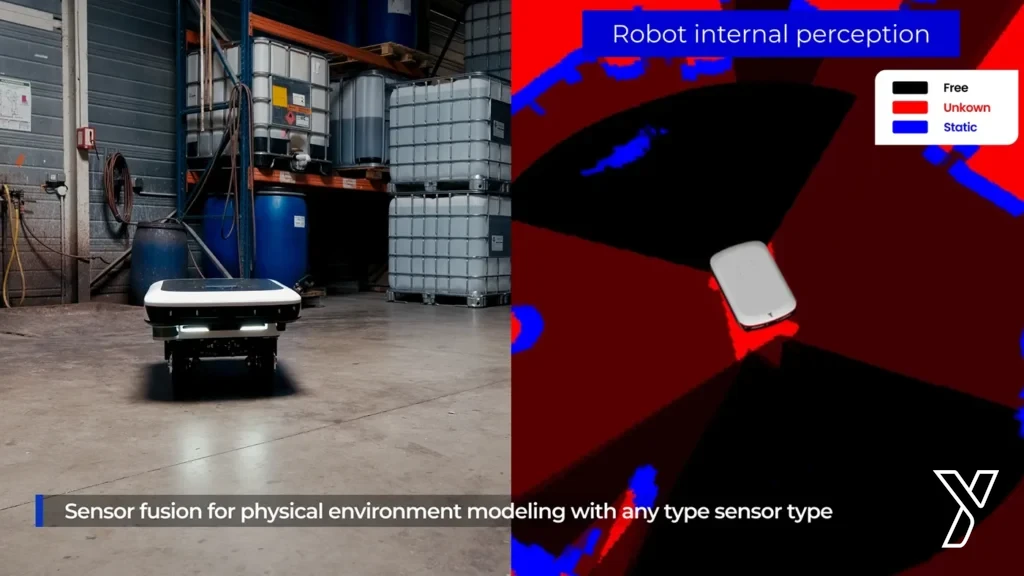
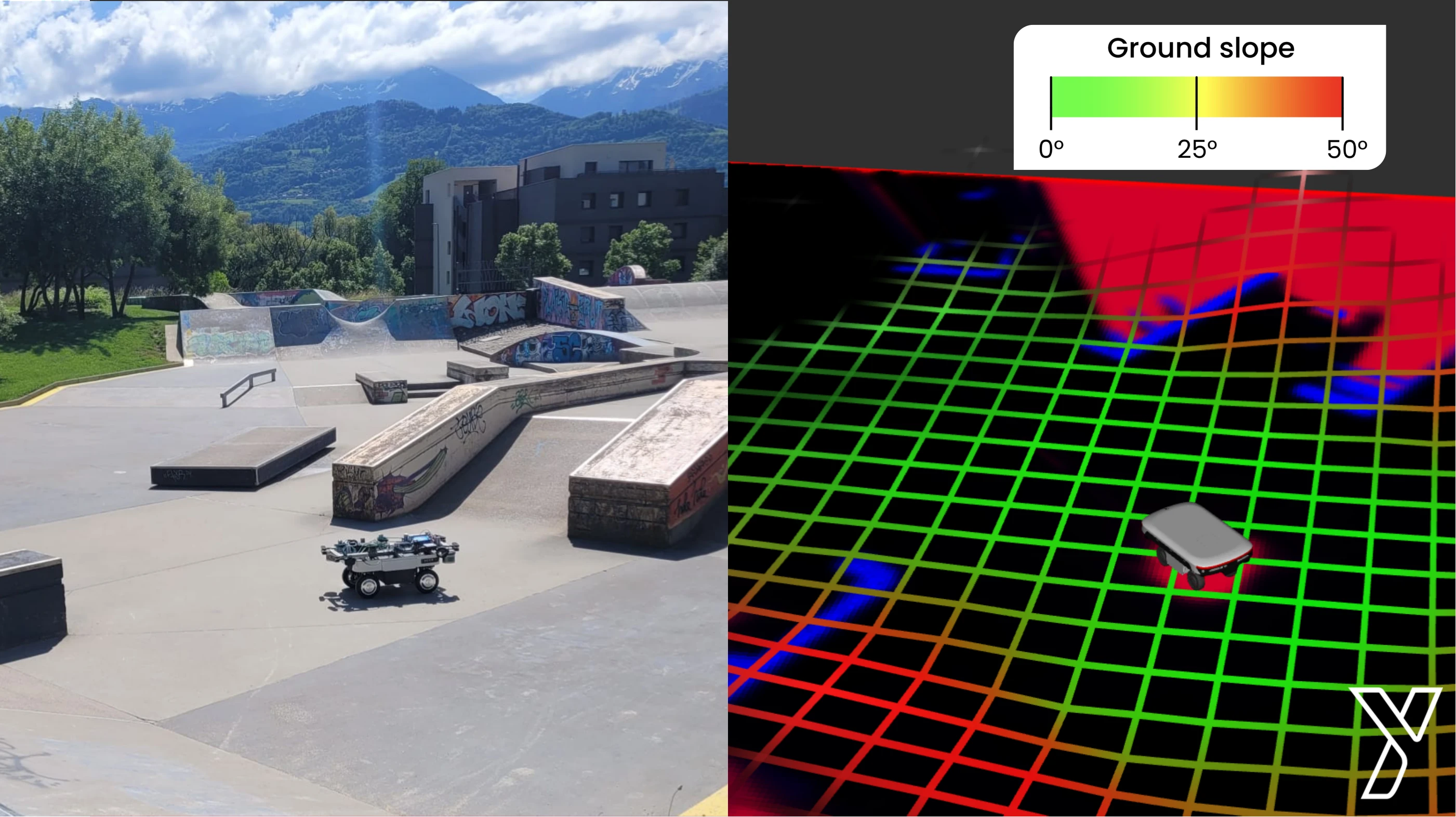
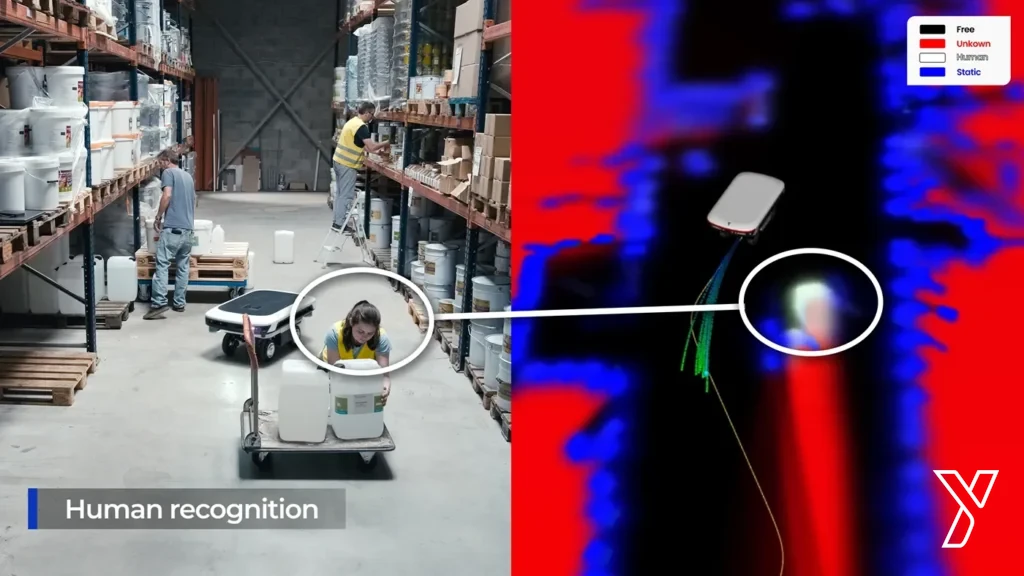
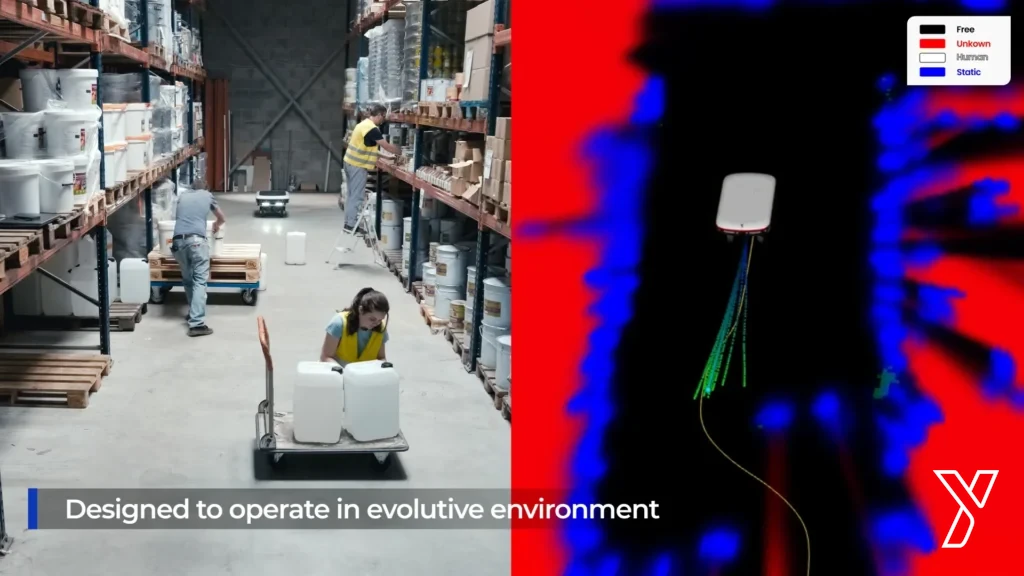
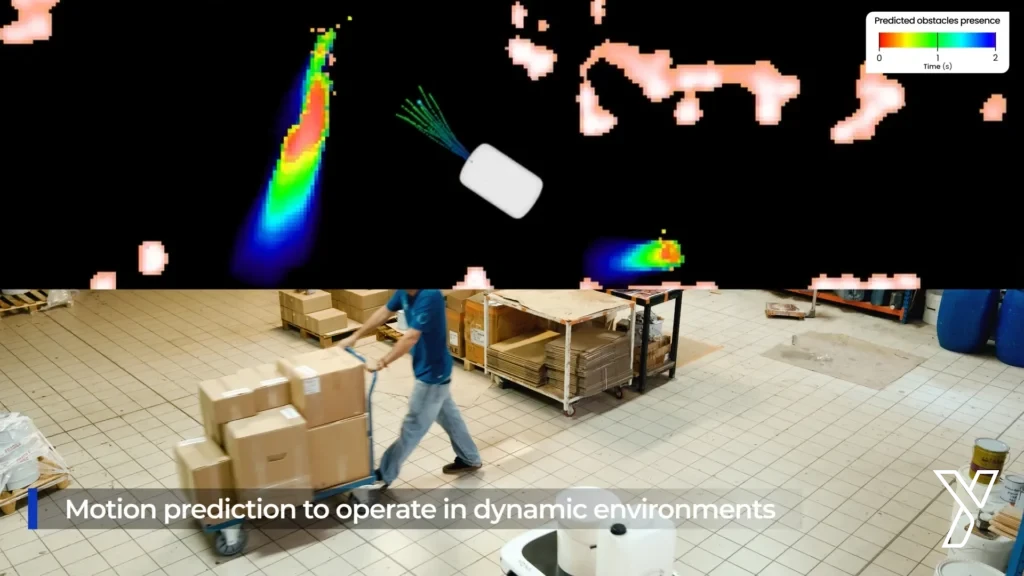
La technologie Yona Robotics construit des grilles d'occupation probabilistes pour représenter l'environnement du robot, à partir de données provenant de différents capteurs (lidar, radar, caméra RGBD, Ultrasons, ToF ...).
Grâce à des modèles probabilistes et une approche bayésienne, les données de chaque capteur sont interprétées, les différentes incertitudes quantifiées et intégrées, puis fusionnées avec les autres capteurs.
A partir des fusions de données et leur filtrage, le robot construit une représentation détaillée, unifiée et dense de son environnement proche en volumes élémentaires.